
- 工业
- 视觉导航
- 无人化

提到无人驾驶环境感知,必然绕不开激光雷达,工业级无人车辆也不例外。绝大多数主机厂采用的都是激光+反光板的方案,但激光技术有其无法忽略的缺点,那就是在工业领域应用成本太高。举例来说,工业领域应用广泛的Sick激光传感器,其LMSXXX系列的价格在2.5-5.5万,NAV3XX系列的价格则在6-8万,而激光反射板成本是1000/块左右。
因此,寻找一种性价比更高的环境感知方案,成为许多企业关心的问题。
针对这个难题,未来机器人给出了自己的答案——视觉定位导航,通过在人工叉车上加装视觉导航模块,实现无人化操作。相比激光导航工业无人车辆,极大地降低了硬件成本,高性价的特点为未来机器人开拓市场带来巨大优势。
高精度、高稳定性的视觉定位导航技术
在工业无人车辆领域,“激光+反光板”的技术路线已经深入人心,其利用激光的三角测距原理来测量周围物体与自身的距离,算法比较容易实现,但固定反光板的方式不仅对场地施工带来困难,而且在一定程度上限制了无人车辆的路线选择。
创立于2015年的未来机器人,首次将视觉SLAM技术应用到工业车辆无人驾驶领域,借助单目摄像头对周围环境进行光学处理,通过图像特征信息分析还原车辆位置,突破了动态环境中的视觉定位和SLAM建图、视觉伺服运动控制、动态环境中的实时避撞等多项关键技术。
虽然算法要复杂很多,但效果比激光方案有过之而无不及,而且路径规划更加灵活。另外,因为不需要安装反光板模块,大大降低了施工难度和缩短了施工周期,可以进一步节省企业的成本。
目前,未来机器人无人叉车整机的差错率已经达到1‰以下,远远低于行业标准的3%。
工业级视觉导航产品的领先优势,离不开创始团队的多年耕耘。未来机器人创始人刘云辉是香港中文大学终身教授、机器人研究所所长, EEE&HKIE Fellow、国际著名机器人专家;国家“千人计划”和“长江学者”;联合创始人李陆洋、方牧、鲁豫杰博士毕业于香港中文大学,在机器人领域皆有超过10年的研发和团队管理经验。
未来机器人的视觉技术,早在2011年便已开始投入研发,期间团队还参与完成了香港GRF、ITF以及国家863等重大机器人研发项目,这为公司的发展积累了大量的数据和经验。
模块化、强适应性的工业车辆无人化产品
工业车辆实现无人化需要解决四个方面的问题:定位、运动控制、路径规划和多机调度。为解决工业无人车辆对周围环境的感知和整机的运动控制的难题,未来机器人将摄像头、控制器、IMU进行模块化整合,可以简单地集成到多种工业车辆,把他们快捷地升级成无人驾驶版本。
另外,结合自主研发的中控、人机交互、智能调度、故障检测与报警、路径规划等五个子系统,进一步增强了工业无人车辆的可靠性、精度和鲁棒性。
模块化的产品不仅提升了整机的稳定性和一致性,也为公司的工业车辆无人驾驶改装服务提供了方便。
工业级市场需求旺盛,潜在规模可达600亿
未来机器人的产品和技术主要应用在工业车辆当中,具体可应用在叉车、牵引车、港机、工程机械等场景,受工业环境和自身技术的限制,目前业务主要集中在电动叉车的改装上。
从需求端出发,由于工业车辆的作业环境一般比较恶劣,面临酷暑、严寒等施工作业条件,工业车辆司机招聘成为困扰企业的难题,目前在岗司机的年龄普遍偏高,无人化替代的需求很大。
根据世界工业车辆统计报告显示,2016年全球叉车总销量115万台,同比增长8.33%,国内2016年叉车销量达37万台,同比增长13.33%。其中电动叉车销量占比达到37.36%。
公开资料显示,国内市场叉车保有量200万台左右,其中电动叉车占比为40%左右,因此有80万辆的电动叉车保有量。由于部分场景不能够改装,因此假设有20%叉车可以改装,每台价格15万元,则改装无人叉车的市场规模为600亿元。
与其他竞争对手不同,未来机器人并没有急于切入主机厂供应商的链条,而是选择与大的甲方合作,直接出售整机产品,这样做不仅能够锻炼团队处理全业务流程的能力,而且知名甲方能够为未来机器人背书,为其带来更高的议价能力和更强的置信度。
近日,爱分析对未来机器人联合创始人、执行董事李陆洋进行专访,现将部分内容分享如下。

爱分析:未来机器人的发展历程有哪些重要的时间节点?
李陆洋:目前来看有三个阶段。第一阶段,2011年9月,我们香港中文大学的孵化团队开始视觉定位导航的研发,研发过程中我们参与完成了香港GRF、ITF以及国家863等重大机器人研发项目;
第二阶段,从2015年3月香港公司成立开始。当年12月,公司第一台视觉导航无人叉车样机落地,这也是中国第一台利用摄像头实现无人化的叉车产品;直到2016年2月,我们深圳公司成立,并完成了天使轮的融资。
第三阶段是2017年1月,我们的样机完成了在客户现场的中试,在佛山某大型制造企业的中试持续了1年多的时间;3月份,我们的产品开始量产并推向市场,截止目前,我们积累了许多大型企业客户。
成本更低、应用场景更加广泛的视觉导航技术
爱分析:未来机器人产品应用的主要场景有哪些?
李陆洋:产品和技术主要应用在工业车辆当中,具体可应用在叉车、牵引车、港机、工程机械等领域。我们了解到,工业车辆的作业环境一般较为恶劣,面临暴晒、酷热、严寒等室外条件,且执行工作的多为重复性劳动,无人化需求较大,企业的支付意愿也很强。
当然,我们的工作并不是直接生产工业车辆,而是利用我们的技术进行整合,实现工业车辆的无人化。
爱分析:实现工业车辆的无人化需要增加哪些应用模块?
李陆洋:主要解决四个问题,一个是定位问题,二是运动控制问题,三是避障和路径规划,四是多机调度问题。那么,需要增加的模块可以分为两大类,一类是传感器,另一类就是控制器。
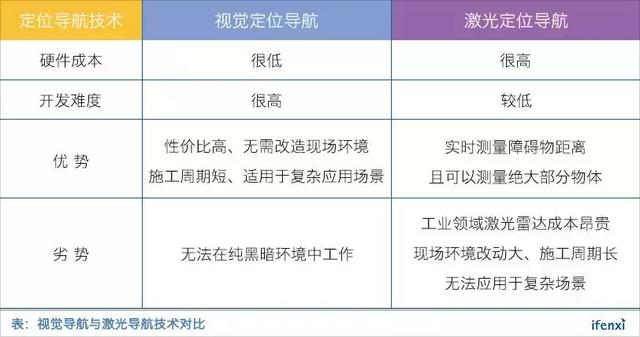
而我们最大的特点也体现在使用摄像机作为传感器,在工业车辆无人化领域,我们是国内唯一一家利用视觉技术进行定位的企业,目前国内绝大多数企业使用的还是激光定位导航技术,视觉定位导航在成本上具有绝对优势。
爱分析:与其他同类型的公司相比,未来机器人的优势是什么?
李陆洋:最重要的一点是,我们的方案性价比更高。工业车辆中性价比的影响要比乘用车大很多,因为工业车辆无法带来乘用车的驾驶乐趣。从成本的角度出发,实现无人化加装的模块价格,要低于企业两年的人工工资,我们发现,国内客户不能接受投资回报周期过长的方法。
第二个是施工难度和施工周期。未来机器人的产品不需要铺设反光板,施工周期由原来的2-3个月缩短到2-3周,减小了客户的损失。
最后一点是复杂场景的应用。视觉定位导航具有非常高的灵活性,更加适应工业复杂环境的应用,而激光+反光板的方式,工业车辆的路线是固定的,库位也是固定不变的,限制了工业车辆的路径选择。

不急于求成,选择直接与大的甲方客户对话
爱分析:未来机器人对于下游客户的拓展方面具有哪些特色?
李陆洋:我们的客户基本上都是规模比较大的甲方,很多同类型的创业公司通常会规避与大的甲方直接接触,而是选择规模较小的AGV公司进行合作,将算法和传感器整合到AGV当中。
我们之所以选择大的甲方,原因有三:一个是锻炼团队,另一个就是我们的议价能力能够在之后变得更强,第三点就是,对于创业公司来说,与大的甲方进行合作,能够为我们背书、增加置信度。
爱分析:客户拓展方面有什么长远规划?
李陆洋:在客户拓展上,我们分三个阶段。
第一阶段是选择大的甲方,以整机的方式进行销售;第二阶段则开始选择叉车制造商作为合作伙伴,首先要理清责任边界,未来机器人负责改装和配套系统软件,销售、调试和维护则由叉车制造企业负责;第三阶段,在与叉车制造企业建立密切合作关系的基础上,加强与大甲方的后装合作,负责核心技术模块的制造并提供定位数据和控制指令,成为一个专业的零部件供应商。
爱分析:不同型号、不同厂家的叉车对产品有不同的要求吗?
李陆洋:我们不需要更改叉车底层的控制、驱动等内容,而是用模块化产品与之直接对接。
目前,行业标准的差错率是3%以下,我们的差错率已经做到1‰,对于我们来说,还有提高的空间。
爱分析:目前客群中使用激光和视觉技术的比例是多少?壁垒有多高?
李陆洋:工业领域,使用视觉定位导航可以说是极少的,激光导航获取的特征点位置是直接信息,因此其技术壁垒并不高;而摄像头拍摄的照片是间接信息,需要从照片中还原定位置信息,对于产品的鲁棒性、抗光照能力、信息匹配程度等要求极高,因此其难度比激光定位要高很多。
摄像头对光照十分敏感,视觉导航只有解决了光照影响的问题,才能应用在7*24小时的场景中,我们现已解决视觉光照问题。
行业集中度低,为创业公司带来更多机会
爱分析:叉车和牵引车改装的收入占比是多少?
李陆洋:目前的收入全部来源于叉车,我们已经具备牵引车改装模块的生产能力。
爱分析:怎么判断无人叉车市场规模?
李陆洋:2016年,国内叉车销量是37万辆,据估算,叉车的保有量为200万辆左右,且电动叉车是我们改装的重点,其占比为40%左右,因此有80万辆的电动叉车保有量。
由于部分场景不能够改装,因此假设有20%叉车可以改装,每台价格15万元,则改装无人叉车的市场规模为600亿元。
爱分析:传统叉车改装成无人叉车的渗透率是多少?
李陆洋:目前国内市场中的实际情况可能只有1%,欧美市场在工业车辆无人化领域比较成熟,渗透率能够达到20%,可以借鉴到国内。
爱分析:无人叉车行业的集中度在将来会发生哪些变化?
李陆洋:可以用“无巨头”来形容目前国内无人叉车的行业集中度,而且由于本身行业对于服务的要求较高,外国巨头也很难切入国内市场。
爱分析:产品生产周期有多长?
李陆洋:在供货充足的情况下,生产时间需要2周,现场调试需要1周,就可以交付客户现场,瓶颈在于供应链方面,供货需要4周时间,因此整个周期是7周左右。
爱分析:未来机器人的长远定位是什么?
李陆洋:未来机器人是一家为工程车辆提供无人传感器和核心零部件的公司。
爱分析:公司团队大概有多少人?
李陆洋:30人的团队,研发有15个人左右,现场调试和销售有10人左右。